¡Ha llegado la hora, equipo! La misión final del curso. Este no es solo un proyecto, es la síntesis de todas sus habilidades. Van a construir un dispositivo de instrumentación completo, multifuncional e interactivo que integra medición ambiental, detección de proximidad, registro de datos y una interfaz gráfica avanzada. Hoy se convierten en diseñadores de sistemas embebidos.
🧠 La Misión Final: Integración Total
Construiremos una estación "todo en uno" que mide temperatura y distancia, permite navegar entre cuatro pantallas con un Joystick, activa alertas sonoras con un Buzzer, permite resetear datos con el botón del joystick y muestra un impresionante radar gráfico con barrido y detección de objetos.
🧠 El Código: El Sistema Operativo Final
Este es el código más completo del curso. Gestiona 4 pantallas, múltiples sensores, actuadores y entradas de usuario simultáneamente.
/*
* PROYECTO INTEGRADOR 3 (Definitivo): Estación Ambiental y Radar Gráfico
* Descripción: Mide temp/distancia, muestra en 4 pantallas OLED navegables,
* registra datos, controla servo y tiene alertas sonoras.
* Por: Profe Campos
* CECyTEM 05 Guacamayas
*/
// --- INCLUSIÓN DE LIBRERÍAS (NUESTRAS "CAJAS DE HERRAMIENTAS") ---
#include <Wire.h> // Necesaria para la comunicación I2C (la usan la pantalla y el sensor de presión).
#include <Adafruit_GFX.h> // Librería gráfica base de Adafruit. Nos da las funciones para dibujar formas (líneas, círculos, etc.).
#include <Adafruit_SSD1306.h> // Librería específica para controlar nuestra pantalla OLED.
#include <OneWire.h> // Librería para el protocolo de comunicación de 1 solo cable del sensor de temperatura.
#include <DallasTemperature.h> // Librería que simplifica la lectura del sensor DS18B20.
#include <Servo.h> // Librería para controlar fácilmente el servomotor.
// --- OBJETOS Y PINES (DEFINIENDO NUESTRO HARDWARE) ---
// Creamos un "objeto" para la pantalla, le damos sus dimensiones y le decimos que use I2C.
Adafruit_SSD1306 display(128, 64, &Wire, -1);
// Creamos los objetos para el protocolo One-Wire y el sensor de temperatura en el pin 2.
OneWire oneWire(2);
DallasTemperature sensors(&oneWire);
// Creamos un objeto para nuestro servomotor.
Servo miServo;
// Definimos constantes para los pines. Es una excelente práctica de programación
// para hacer el código más legible y fácil de modificar en el futuro.
const int pinTrig = 9;
const int pinEcho = 10;
const int pinJoyY = A0;
const int pinJoySW = 3; // Pin para el botón del Joystick.
const int pinServo = 6;
const int pinBuzzer = 4;
// --- VARIABLES GLOBALES (LA MEMORIA DE NUESTRO PROGRAMA) ---
// Esta variable es el "cerebro" de nuestro menú. Guarda en qué pantalla estamos.
int pantallaActual = 0; // 0=Principal, 1=DataLog, 2=Radar Gráfico, 3=Radar Numérico
// Variables para almacenar las lecturas de los sensores.
float distanciaCm = 0;
float tempC = 0;
long duracion; // Necesita ser 'long' para guardar valores grandes de microsegundos.
// Variables para el registro de datos (Data Logging).
// Las inicializamos con valores "imposibles" para que la primera lectura real los reemplace.
float tempMax = -100; // Un valor muy bajo para asegurar que la primera lectura sea mayor.
float tempMin = 200; // Un valor muy alto para asegurar que la primera lectura sea menor.
float distMax = 0;
float distMin = 500; // Un valor alto para asegurar que la primera lectura sea menor.
//=============================================================================
// FUNCIÓN SETUP: Se ejecuta UNA SOLA VEZ al encender o resetear el Arduino.
//=============================================================================
void setup() {
// Iniciamos la comunicación con la computadora para poder ver mensajes de depuración.
Serial.begin(9600);
// Iniciamos cada componente de hardware.
sensors.begin(); // Inicia la comunicación con el sensor de temperatura.
miServo.attach(pinServo); // Asocia nuestro objeto servo al pin físico 6.
// Configuramos los pines (INPUT o OUTPUT).
pinMode(pinTrig, OUTPUT);
pinMode(pinEcho, INPUT);
pinMode(pinBuzzer, OUTPUT);
// Configuramos el pin del botón del joystick como entrada con una resistencia PULL-UP interna.
// Esto significa que el pin estará en HIGH por defecto, y en LOW cuando se presione (lo conecta a GND).
pinMode(pinJoySW, INPUT_PULLUP);
// Intentamos iniciar la pantalla OLED y mostramos un error si no se encuentra.
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
Serial.println(F("Fallo al iniciar SSD1306"));
for(;;); // Detiene el programa si no hay pantalla.
}
// Mostramos una pantalla de bienvenida.
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(SSD1306_WHITE);
display.setCursor(10, 10);
display.println("SISTEMA");
display.setCursor(10, 35);
display.println("INICIADO");
display.display(); // ¡Crucial! Este comando dibuja todo lo preparado en la pantalla.
delay(2000);
}
//=============================================================================
// FUNCIÓN LOOP: El corazón del programa. Se repite infinitamente.
//=============================================================================
void loop() {
// --- NAVEGACIÓN Y ACCIONES DEL JOYSTICK ---
// Leemos el valor analógico del eje Y del joystick (0-1023).
int valorJoy = analogRead(pinJoyY);
if (valorJoy < 100) { // Si el joystick se mueve hacia abajo...
pantallaActual++; // ...pasamos a la siguiente pantalla.
if (pantallaActual > 3) pantallaActual = 0; // Si nos pasamos de la 3, volvemos a la 0.
delay(200); // Pequeña pausa para evitar que un solo toque cambie varias pantallas.
}
if (valorJoy > 900) { // Si el joystick se mueve hacia arriba...
pantallaActual--; // ...vamos a la pantalla anterior.
if (pantallaActual < 0) pantallaActual = 3; // Si nos pasamos de la 0, vamos a la 3.
delay(200);
}
// Si estamos en la pantalla de Data Log (1) y el botón se presiona (estado LOW)...
if (pantallaActual == 1 && digitalRead(pinJoySW) == LOW) {
resetDataLog(); // ...llamamos a la función para reiniciar los datos.
}
// --- LECTURA DE SENSORES ---
leerSensores(); // Llamamos a una función para mantener el loop limpio y ordenado.
// --- ACTUALIZACIÓN DE DATOS MÁXIMOS Y MÍNIMOS ---
actualizarDataLog(); // Llamamos a la función que compara y actualiza los registros.
// --- COMPROBACIÓN DE ALERTAS (SIEMPRE ACTIVA) ---
comprobarAlertas(); // Esta función revisa si hay condiciones de peligro en cada ciclo.
// --- ACTUALIZAR PANTALLA ---
display.clearDisplay(); // Limpiamos el buffer de la pantalla antes de dibujar de nuevo.
// Decidimos qué pantalla dibujar basándonos en la variable 'pantallaActual'.
if (pantallaActual == 0) dibujarPantallaPrincipal();
else if (pantallaActual == 1) dibujarPantallaDataLog();
else if (pantallaActual == 2) dibujarPantallaRadarGrafico();
else if (pantallaActual == 3) dibujarPantallaRadarNumerico();
display.display(); // Mostramos en la pantalla física todo lo que dibujamos.
delay(100); // Pausa general para dar estabilidad al ciclo.
}
//=============================================================================
// --- FUNCIONES AUXILIARES ---
// Dividir el código en funciones más pequeñas lo hace más legible y reutilizable.
//=============================================================================
// Función para leer todos los sensores y actualizar sus variables.
void leerSensores() {
sensors.requestTemperatures();
tempC = sensors.getTempCByIndex(0);
digitalWrite(pinTrig, LOW);
delayMicroseconds(2);
digitalWrite(pinTrig, HIGH);
delayMicroseconds(10);
digitalWrite(pinTrig, LOW);
duracion = pulseIn(pinEcho, HIGH);
distanciaCm = duracion * 0.0343 / 2.0;
distanciaCm = constrain(distanciaCm, 0, 200); // Limitamos la lectura a un máximo de 200cm para evitar valores erróneos.
}
// Función para comparar las lecturas actuales con los máximos/mínimos guardados.
void actualizarDataLog() {
if (tempC > tempMax) tempMax = tempC;
if (tempC < tempMin) tempMin = tempC;
if (distanciaCm > distMax) distMax = distanciaCm;
// Solo actualizamos el mínimo si la distancia es mayor a 0 para ignorar lecturas fallidas.
if (distanciaCm < distMin && distanciaCm > 0) distMin = distanciaCm;
}
// Función para reiniciar los datos del Data Logger.
void resetDataLog() {
tempMax = tempC; // Reinicia al valor actual.
tempMin = tempC; // Reinicia al valor actual.
distMax = distanciaCm;
distMin = distanciaCm;
// Damos una retroalimentación al usuario para que sepa que la acción se realizó.
tone(pinBuzzer, 1500, 100); // Un "bip" agudo y corto.
display.clearDisplay();
display.setTextSize(2);
display.setCursor(15,25);
display.print("DATOS");
display.setCursor(5,45);
display.print("REINICIADOS");
display.display();
delay(1000); // Mostramos el mensaje por 1 segundo.
}
// Función que revisa las condiciones de peligro en cada ciclo del loop.
void comprobarAlertas() {
// La condición es: si la temperatura supera 40 grados O (||) la distancia es menor a 10cm (y no es 0).
if (tempC > 40.0 || (distanciaCm < 10 && distanciaCm > 0)) {
// Indicador visual: un triángulo parpadeante en la esquina superior izquierda.
display.fillTriangle(0,0, 10,0, 0,10, SSD1306_WHITE);
// Alerta sonora: un tono de 2000 Hz por 150 milisegundos.
tone(pinBuzzer, 2000, 150);
}
}
// --- FUNCIONES DE DIBUJO DE PANTALLAS ---
// Dibuja la pantalla principal (Temperatura).
void dibujarPantallaPrincipal() {
display.setTextSize(1);
display.setCursor(0, 0);
display.print("--- MONitoreo AMBIENTAL ---");
display.setTextSize(2);
display.setCursor(5, 20);
display.print(tempC, 1);
display.print(" ");
display.setTextSize(1);
display.drawCircle(75, 22, 3, SSD1306_WHITE); // Símbolo de grados.
display.setTextSize(2);
display.print("C");
// El servo actúa como una aguja, mapeando un rango de temperatura (0-50°C) al rango del servo (0-180°).
int anguloTemp = map(tempC, 0, 50, 0, 180);
miServo.write(anguloTemp);
display.setTextSize(1);
display.setCursor(0, 55);
display.print("Mover Joystick para ver mas");
}
// Dibuja la pantalla de registro de datos.
void dibujarPantallaDataLog() {
display.setTextSize(1);
display.setCursor(0, 0);
display.print("--- REGISTRO DE DATOS ---");
display.setCursor(0, 15);
display.print("T.Max: "); display.print(tempMax, 1); display.print("C");
display.setCursor(0, 28);
display.print("T.Min: "); display.print(tempMin, 1); display.print("C");
display.setCursor(0, 41);
display.print("D.Max: "); display.print(distMax, 0); display.print("cm");
display.setCursor(0, 54);
display.print("D.Min: "); display.print(distMin, 0); display.print("cm");
}
// Dibuja la pantalla del radar gráfico.
void dibujarPantallaRadarGrafico() {
display.setTextSize(1);
display.setCursor(0, 0);
display.print("--- RADAR GRAFICO ---");
// Esta lógica crea un barrido continuo del servo de 0 a 180 y de regreso.
static int anguloScan = 0; // 'static' hace que la variable recuerde su valor entre llamadas a la función.
static int direccion = 1; // 1 para adelante, -1 para atrás.
anguloScan += direccion;
if (anguloScan >= 180 || anguloScan <= 0) {
direccion *= -1; // Invierte la dirección al llegar a los extremos.
}
miServo.write(anguloScan);
// Dibujar el arco del radar usando una función de la librería GFX.
display.drawArc(64, 63, 60, 60, 0, 180, SSD1306_WHITE);
// Dibujar la línea de barrido. Requiere algo de trigonometría (seno y coseno) para
// calcular el punto final (x2, y2) de la línea basándose en el ángulo del servo.
float anguloRad = anguloScan * PI / 180.0; // Convertimos el ángulo a radianes.
int x2 = 64 - cos(anguloRad) * 60;
int y2 = 63 - sin(anguloRad) * 60;
display.drawLine(64, 63, x2, y2, SSD1306_WHITE);
// Si detectamos un objeto dentro del rango del radar (60cm)...
if (distanciaCm < 60) {
// ...calculamos su posición en la pantalla basándonos en el ángulo actual del servo y la distancia medida.
float anguloBlip = miServo.read() * PI / 180.0;
int xBlip = 64 - cos(anguloBlip) * distanciaCm;
int yBlip = 63 - sin(anguloBlip) * distanciaCm;
display.fillCircle(xBlip, yBlip, 3, SSD1306_WHITE); // Dibujamos el "blip" del objeto.
}
}
// Dibuja la pantalla del radar numérico.
void dibujarPantallaRadarNumerico() {
display.setTextSize(1);
display.setCursor(0, 0);
display.print("--- RADAR DE PROXIMIDAD ---");
display.setTextSize(3);
display.setCursor(5, 25);
display.print(distanciaCm, 0);
display.setTextSize(2);
display.print("cm");
// La barra se llena a medida que el objeto se acerca (mapeo inverso de distancia).
int barra = map(distanciaCm, 100, 5, 0, 128);
barra = constrain(barra, 0, 128);
display.fillRect(0, 58, barra, 6, SSD1306_WHITE);
// El servo actúa como un indicador de aguja, también inverso a la distancia.
int anguloDist = map(distanciaCm, 5, 100, 180, 0);
miServo.write(anguloDist);
}
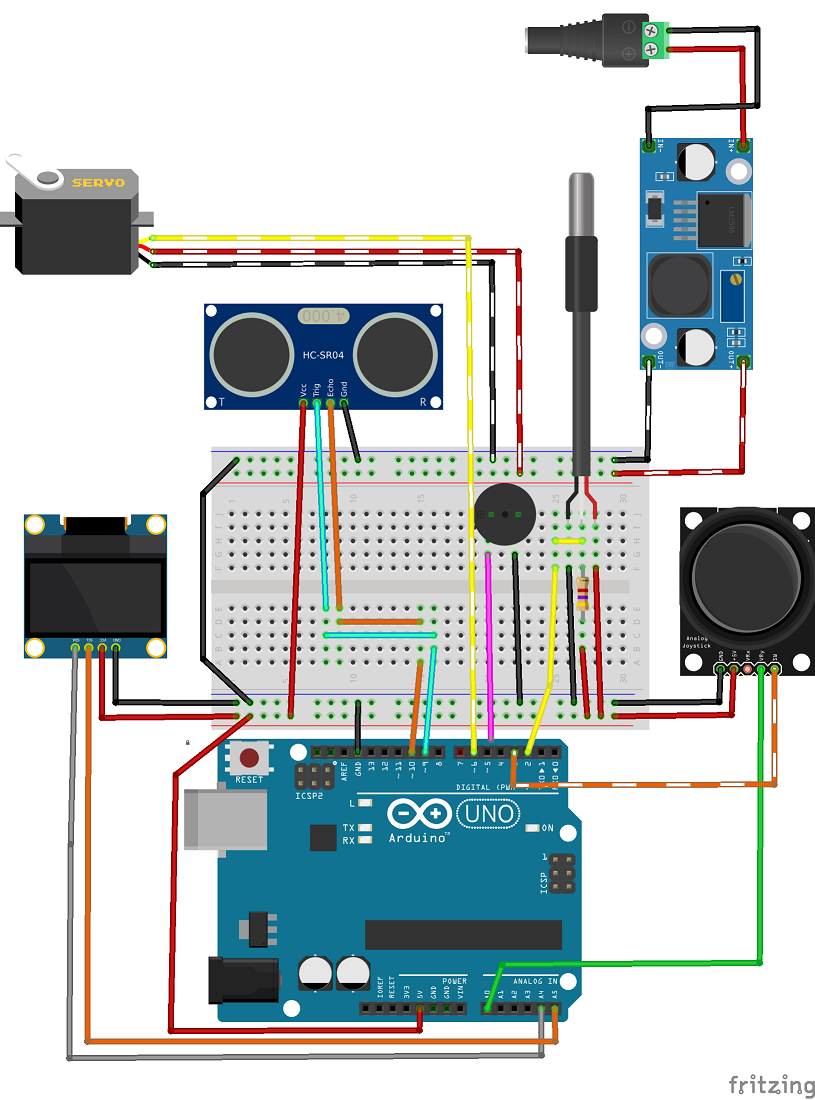
🔌 Manos a la Obra: El Circuito
Este es el circuito final. Combina todos los componentes que hemos usado en el parcial. La gestión del cableado en la protoboard será parte del reto para lograr un montaje limpio y funcional.
Diagrama del Circuito 13
💡 Conceptos Clave de la Misión
- Multitarea Secuencial: Aunque el Arduino solo hace una cosa a la vez, al hacerlas muy rápido en el `loop()` (leer, procesar, dibujar), se crea la ilusión de que todo sucede al mismo tiempo.
- Modularidad del Código: Dividir un programa complejo en funciones más pequeñas y específicas hace que sea más fácil de escribir, depurar y entender.
- Diseño de Sistemas Embebidos: El proceso de integrar hardware y software para cumplir un conjunto de requisitos específicos en un dispositivo autónomo.
🚀 ¡Felicidades! ¡Misión Cumplida!
Al completar este proyecto, no solo has aprendido a seguir instrucciones, has aprendido a pensar como un ingeniero: a analizar un problema, a dividirlo en partes más pequeñas, a seleccionar los componentes adecuados y a escribir la lógica para que todo funcione en armonía. ¡El futuro de la automatización está en tus manos!